Für alle an dem Bauprozess beteiligten Parteien ist es schwierig die Lage oder die Koordinaten eine Information im Gebäude zuverlässig zu beschreiben und zu verorten. Besonders im Rohbauzustand gibt es wenig Orientierungspunkte um die Informationen einer Begehung zuverlässig zu dokumentieren.
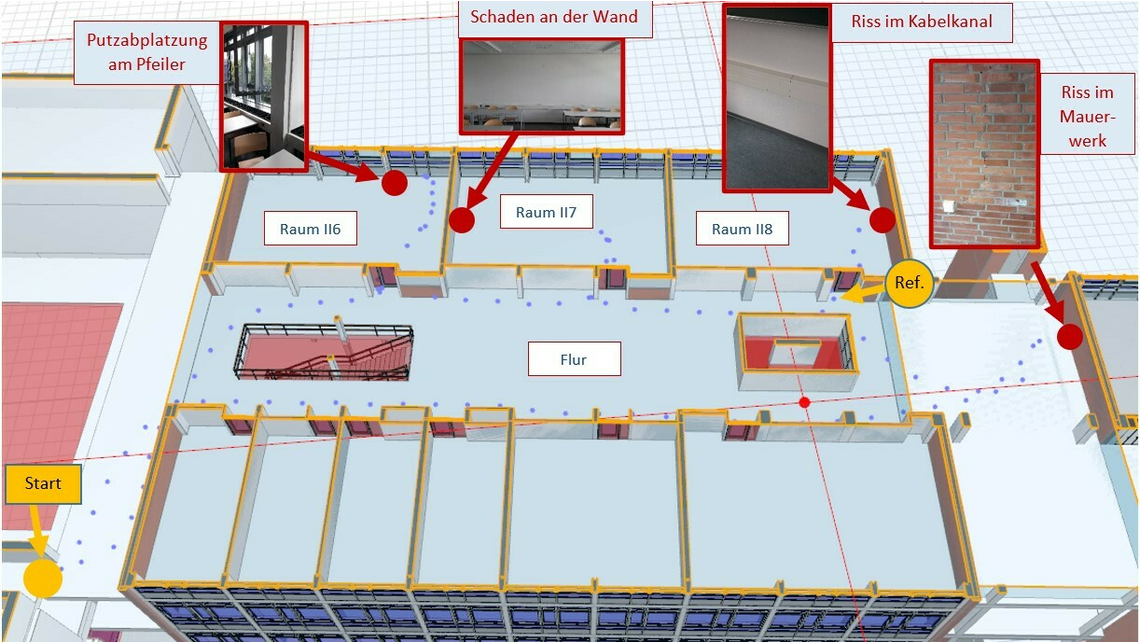
Der in diesem Demonstrator entwickelte Ansatz, Informationen und Daten wie Sprachnachrichten, Fotos oder Notizen aus einem aufgezeichneten Bewegungspfad einer Gebäudebegehung in ein Industrial Fundation Class (IFC) Modell zu integrieren und zu überlagern, richtet sich an alle Akteure entlang der Wertschöpfungskette Bau. Der entwickelte Algorithmus kann Daten und Informationen aus einem Bewegungspfad automatisch den Räumen in einem Industrial Fundation Class (IFC) Modell zuordnen. Die Zuordnung und Ausrichtung der jeweiligen Koordinatensysteme ist automatisiert. Zur Erstellung des Bewegungspfades wurde ein autonomes Innenraum Positionierungssystem (IPS) verwendet. Das verwendete IPS funktioniert über eine am Schuh montierten Inertialmesseinheit (IMU) und einem Pedestrian Dead Reckoning (PDR)-System das zur Verortung in Innenräumen ohne GPS-Empfang genutzt werden kann, was ein typisches Problem am Bau löst. Der entwickelte Algorithmus ist unabhängig vom dem beschriebenen IPS nutzbar und einfach an ein anderes IPS anzupassen. Die vorgestellte Anwendung bietet einen offenen BIM-Ansatz für eine robuste und effiziente Datenüberlagerung. Der Ansatz kann ebenfalls für eine Echtzeit-Lokalisierung bzw. Simultaneous Localization and Mapping (SLAM) auf einem mobilen Endgerät verwendet werden.