







Das mobile Robotersystem besteht aus einem autonom agierenden fahrerlosen Transportsystem (MiR – Mobile Industrial Robot) mit aufgesetztem Roboter (Universal Robots UR5). Mit diesem Demonstrator werden Lösungsansätze aus den Bereichen Intralogistik, stationäre und mobile Robotik sowie Mensch-Roboter-Kollaboration (MRK) abgebildet. Er wird für Lern- und Trainingsveranstaltungen, insbesondere im Bereich der Programmierung, eingesetzt.
Im Bereich der Intralogistik bildet der Demonstrator Lösungen ab, um auch flexible Transportaufgaben automatisiert zu erledigen. Der Transport von Material innerhalb des Unternehmens bindet Mitarbeiterressourcen, die somit für die wertschöpfenden Fertigungsprozesse nicht zur Verfügung stehen. Der Einsatz von starren Fördereinrichtungen wie Fließbänder erfordert viel Platz und ist für flexible oder sich regelmäßig ändernde Abläufe nicht geeignet.
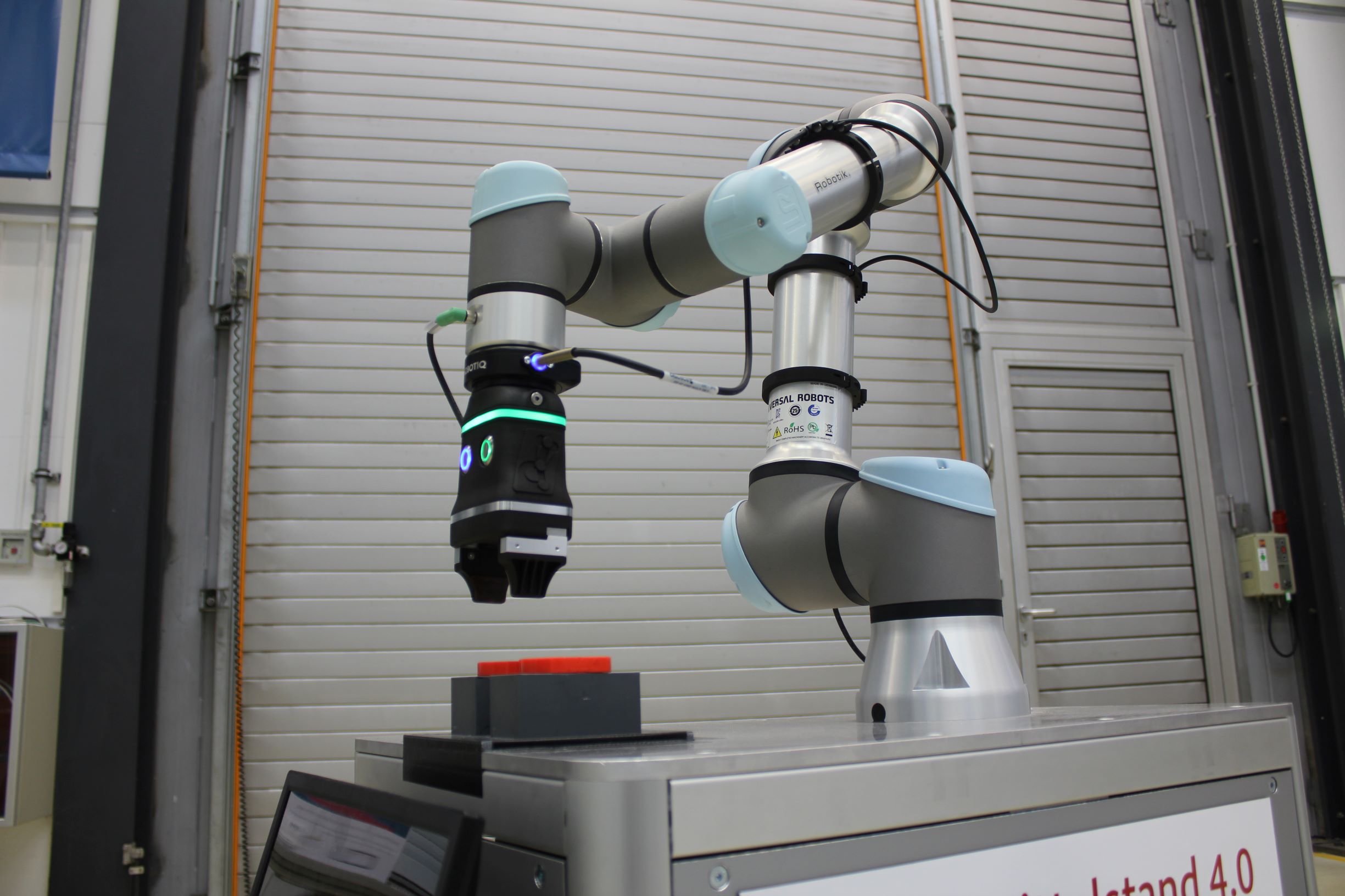
Im Bereich der Robotik bietet der Demonstrator eine hohe Flexibilität, welche ihn für wechselnde Aufgaben einsetzbar macht. Durch die MRK-Fähigkeit der eingesetzten Komponenten (mobile Plattform, Roboterarm, Robotergreifer) lässt sich das Gerät auch ohne Schutzzaun in einem gemeinsamen Arbeitsbereich mit dem Menschen betreiben.
Vorteile der Lösung
Die mobile Roboterplattform kann sowohl Logistik- als auch Handhabungs- und Montageaufgaben übernehmen und so Mitarbeiter entlasten. Die Ausführungsreihenfolge kann dynamisch angepasst und so die Betriebsabläufe optimiert werden. Eine individualisierbare browserbasierte Bedieneroberfläche ermöglicht einfache Änderungen der Abläufe auch ohne spezielle Kenntnisse.
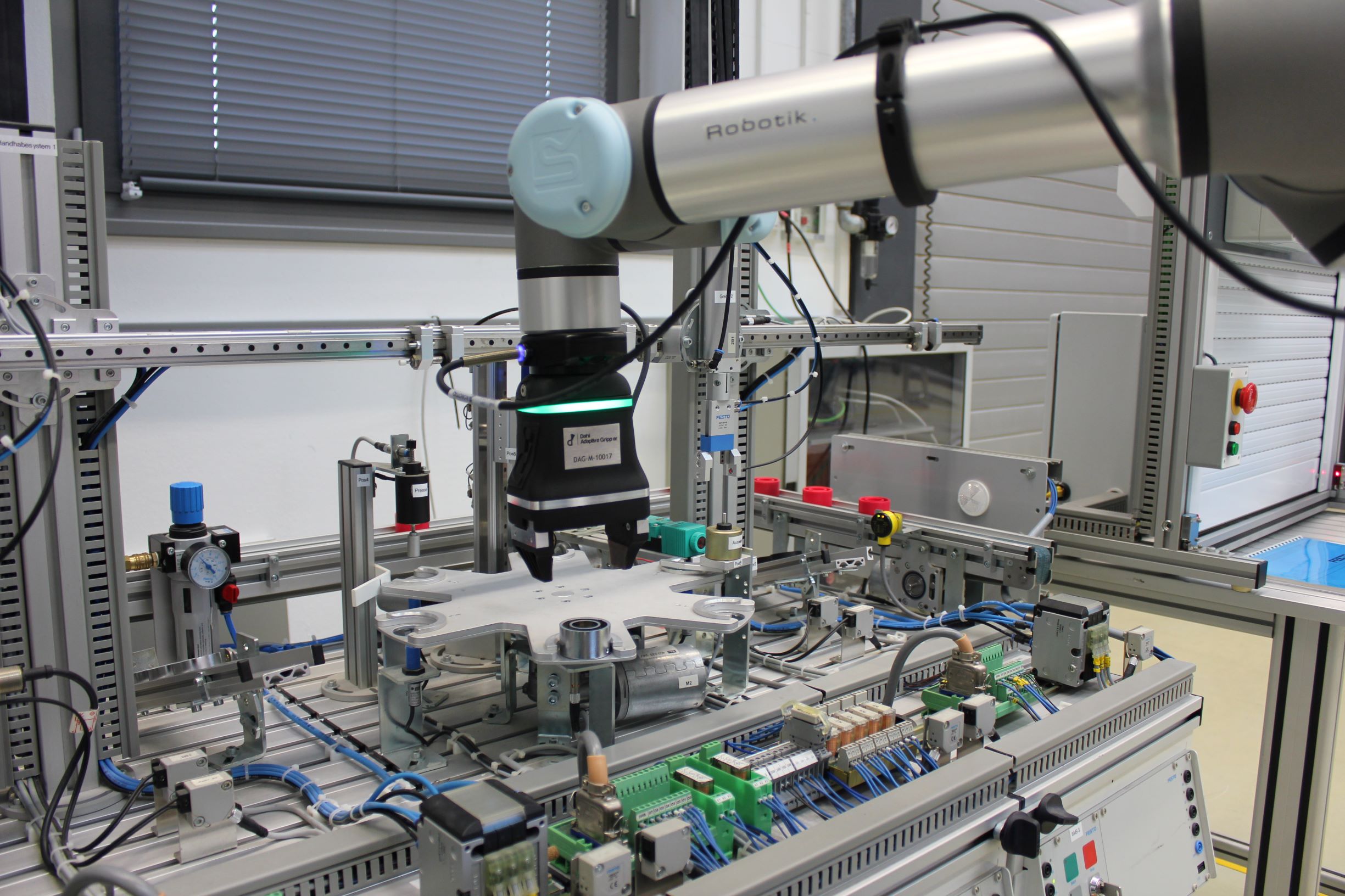
Der ausgesetzte Roboterarm lässt sich auch für reguläre stationäre Aufgaben einsetzen. Durch die Kombination mit der mobilen Plattform ist aber zusätzlich ein selbstständiger Wechsel der Arbeitsstation möglich. Die Stärke des Systems besteht in der freien Kombinierbarkeit der stationären Aufgaben mit dem selbstständigen Materialtransport.
Durch eine adaptive Wegplanung kann das mobile Robotersystem selbstständig auf sich ändernde Umgebungsbedingungen reagieren und benötigt keine separaten Verfahrwege. Da der aufgesetzte Roboter für Mensch-Roboter-Kollaboration geeignet ist, können mit ihm flexible Automatisierungslösungen ohne Schutzzaun realisiert werden.
Demonstrationsszenarien
Im Demonstrator werden verschiedene Technologien eingesetzt, um die selbstständige Navigation und den flexiblen Einsatz an mehreren Arbeitsstationen zu ermöglichen und gleichzeitig die Sicherheit des Menschen durchgehend zu gewährleisten.
Über verschiedene Sensoren (Laserscanner, Ultraschall, Kamera) kann sich die Plattform orientieren, selbstständig eine Karte ihrer Umgebung erstellen, darin navigieren und auch auf Änderungen der Umgebung dynamisch reagieren (z. B. einen anderen Weg suchen, wenn der geplante Weg versperrt ist).
Im eingesetzten Roboterarm und –greifer werden die für die Bewegungen benötigen Kräfte und Drehmomente durchgehend überwacht. So können ungewollte Kollisionen erkannt und darauf reagiert werden. Dies ist insbesondere wichtig, um zu verhindern, dass es zu für den Menschen gefährlichen Situationen kommen kann.
Einsatzgebiete/ Branchen
Das System ist insbesondere für die Handhabung von kleinerem Material (<4 kg bis ca. 10 cm Kantenmaß) geeignet. Zusätzlich zum aufgesetzten Roboter kann die Plattform etwa 20 kg zusätzliches Material transportieren. Ohne den aufgesetzten Roboter stünde mehr Platz und Ladekapazität (ca. 100 kg) zur Verfügung. Es sind allerdings auch größerer Versionen (sowohl für Plattform als auch Roboterarm) erhältlich.
Der Einsatz der Plattform ist nicht auf bestimmte Anwendungen beschränkt, er ist jedoch wirtschaftlich vor allem dann sinnvoll, wenn ein häufiges selbstständiges Verfahren des Gerätes erforderlich ist (für den Materialtransport und/ oder den Wechsel der Arbeitsstation).